бесплатный звонок
+7 (915) 895-11-30
офис в г. Обнинск
Режим работы:
с 09:00 до 18:00 по будням

Что такое RTK съемка?
RTK (Real-Time Kinematic - кинематика в реальном времени) - метод съемки, при котором делается запрос, чтобы мобильный приемник практически мгновенно определял координаты своего текущего местоположения с сантиметровой точностью.
Используются два приемника: один (база) устанавливается на выбранном пункте, в то время как другой (ровер) используется для съемки.
База будет либо:
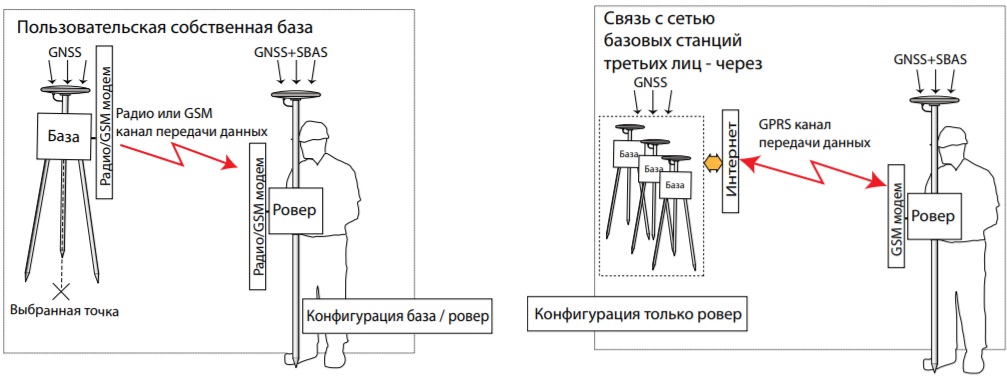
Для передачи RTK поправок базового приемника (базы) к роверу должен быть установлен канал передачи данных.
Передача данных может быть осуществлена несколькими способами:
– UHF радио
– сотовый модем (GSM, GPRS или CDMA)
– другие внешние устройства (такие как Wi-Fi и др.).
Успешная съемка требует инициализации системы и сохранения инициализации в течение всей съемки.
Может быть несколько одновременно работающих роверов, причем каждый получает данные RTK поправок от той же самой базы.
Как осуществляется съемка точек?
Определение и регистрация координат пунктов осуществляется в выбранной системе координат.
Ключевые моменты
• Перед началом работы необходимо удостовериться, что ровер получает RTK положение (инициализация должна быть достигнута и поддерживаться).
• Антенную вешку необходимо удерживать вертикально на каждом пункте съемки (если не используется приемник с компенсацией наклона).
• Время съемки на каждом пункте устанавливается пользователем (количество эпох).
• В течение отсчета эпох ровер усредняет последовательные положения, которые он вычисляет.
• При количестве эпох = 1 ровер регистрирует только первое положение, которое он вычисляет на этом пункте (нет усредненного положения).
Что такое автоматическая съемка по времени или интервалу?
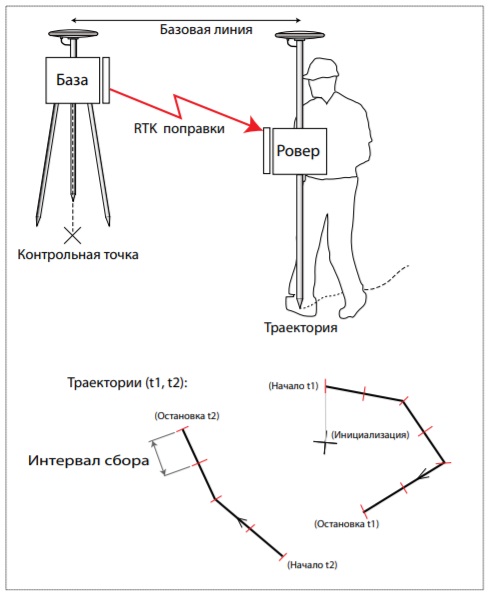
• Пункты автоматически регистрируются с равномерным интервалом по времени или по расстоянию. Перед началом съемки необходимо установить интервал
регистрации.
• Так как съемка осуществляется вдоль траектории, то все регистрируемые пункты будут обязательно “единожды снятыми“ точками, то есть первое решение положения, доступное во время регистрации точки, будет сохранено (в этом случае никакое усреднение положения не возможно).
Как осуществляется вынос точек в натуру?
Направляясь в поле для поиска точного расположения точек, необходимо маркировать их соответствующим образом и затем регистрировать их положения с помощью ровера.
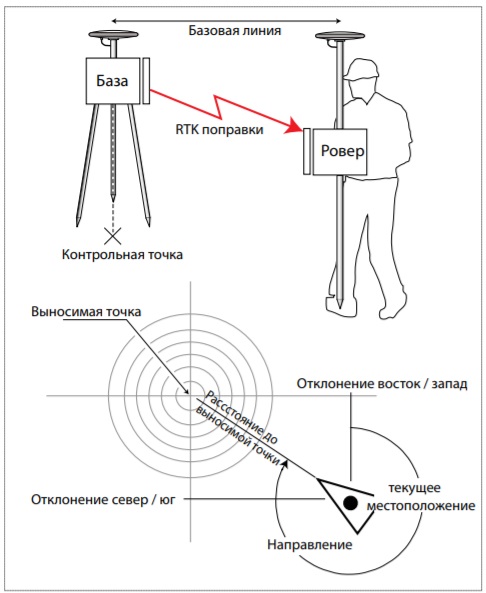
• Выберите нужную точку из списка точек, предварительно загрузив список в полевой контроллер. После выбора точки экран контроллера будет вести к выносимой точке.
• Удерживайте антенную вешку вертикально, поскольку система ведет к точке. Система сообщит, когда антенна приемника окажется над точкой.
• Когда антенна приемника окажется над точкой, закрепите ее положение на земле. Можно сохранить координаты выносимой точки.
Что такое съемка с постобработкой?
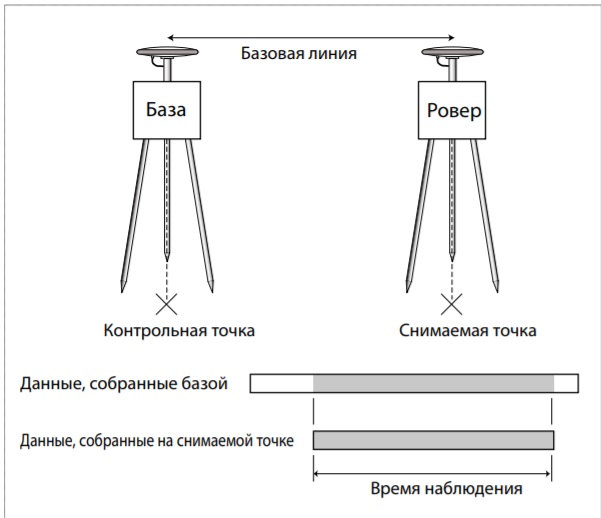
При съемке с постобработкой полевое оборудование используется только для записи GNSS сырых данных, которые программное обеспечение постобработки сможет обсчитать для получения положения с сантиметровой точностью.
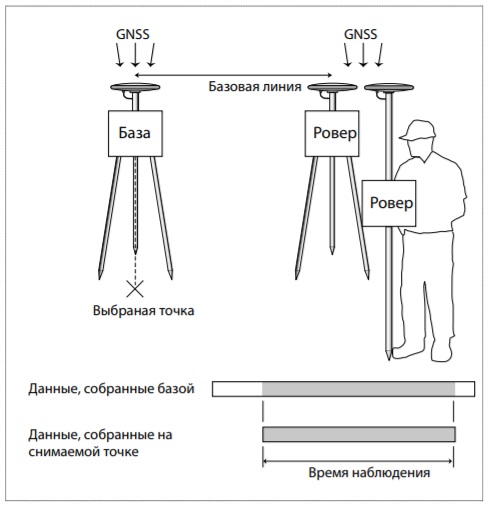
1.Используются две системы: одна (база) устанавливается на выбранном пункте, в то время как другая (ровер) используется для съемки. Базой может быть либо собственная база пользователя, тогда база должна быть расположена должным образом, или база, управляемая третьим лицом.
Для требуемого для постобработки времени наблюдений данные от базы третьих лиц могут быть получены через Интернет (CORS, RGP). Данные мобильного приемника могут быть также подгружены к данным базы (OPUS), обеспечивая вычисление положения с сантиметровой точностью.
2. Данные должны быть собраны одновременно базой и ровером. Всегда используйте одну и ту же частоту записи сырых данных на обоих приемниках.
3. Успешная съемка требует надлежащей инициализации системы. Поддерживать инициализацию на всем протяжении съемки нужно всегда, особенно надо быть осторожным при кинематических съемках, чтобы не “закрыть видимость” GNSS антенне ровера.
4. Время наблюдений определяется установкой (стартом) последнего устройства и выключением (окончанием работы) первого устройства. Желательно сначала начать наблюдения на базе и выключить ее последней.
5. Требуемое время наблюдений главным образом зависит от длины базовой линии, условий приема и метода используемой инициализации.
6. Помните, ровер всегда будет собирать данные непрерывно на всем протяжении съемки, выполняется ли статическая, непрерывная кинематическая или кинематическая Stop & Go съемки. Именно поэтому необходимо непрерывно держать GNSS антенну, так чтобы она не была закрыта никакими преградами.
7. В одно и тоже время можно осуществлять сбор данных несколькими роверами.
Статическая съемка
Ключевые моменты
1. Та же самая установка системы и для базы, и для ровера.
2. Ровер неподвижен на всем протяжении съемки.
3. Время съемки равно времени наблюдений.
4. Проблемы инициализации и “закрытия“ антенны препятствиями минимизированы, так как ровер неподвижен.
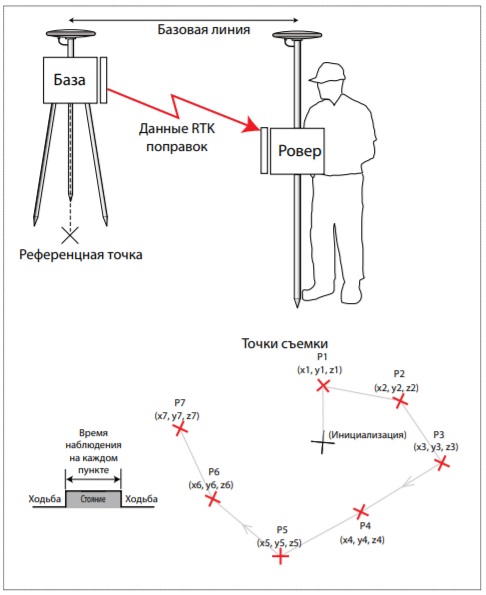
Кинематическая съемка Stop & Go
Съемка нескольких точек в пределах относительно небольшой области
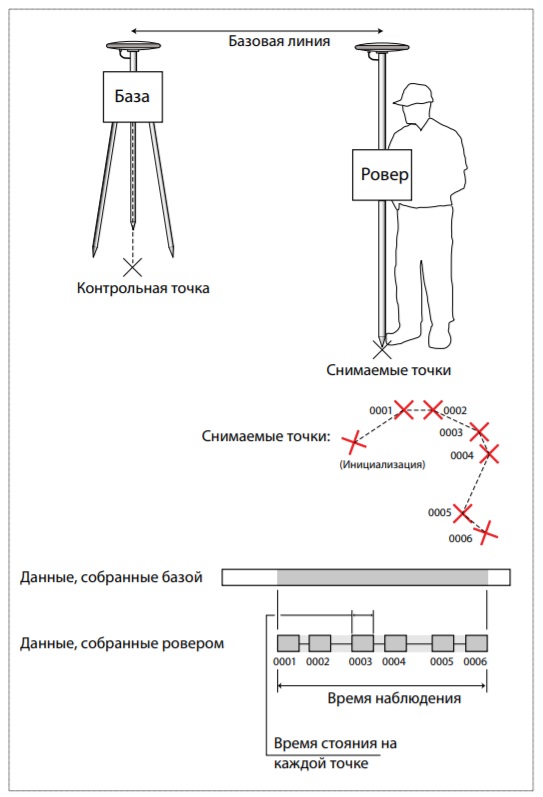
1. Ровер перемещается последовательно, становясь на каждой из снимаемых точек. Антенная вешка ровера должна сохранять вертикальность на каждом пункте съемки в течение заданного времени съемки.
2. Пользователь заранее устанавливает время съемки на каждой снимаемой точке. Окончание отсчета в обратном направлении сообщит, когда надо начать двигаться на следующую точку.
3. Съемка точки в режиме Stop & Go (Стой и иди) с помощью ровера просто состоит из вставки метки начала и конца в регистрируемый сырой файл данных.
4. Точки автоматически именуются (цифровой суффикс автоматически увеличивается), если для каждой точки не присваивается специальное имя.
5. Время съемки фактически определяет период времени, для которого программное обеспечение постобработки будет усреднять последовательные положения, определяемые в течение этого периода времени.
Как выбрать местоположение базового приемника?
Правильный выбор местоположение базы очень важен для успешной съемки. При выполнении постобработки или съемки в режиме реального времени одно- или двухчастотными приемниками необходимо помнить, что положение ровера будет всегда вычисляться относительно положения базы. Любая погрешность определения положения базы будет неизбежно передана положению, вычисленному ровером.
Основных критерии, которые необходимо принимать во внимание при установке базы:
1. условия GNSS приема
2. положение базы известно или неизвестно?
Когда используется радиомодем базы, имеется третий критерий, который может быть принят во внимание при выборе местоположения базы: радиоантенна должна быть установлена настолько высоко, насколько это возможно (с минимумом преград для работы, так, чтобы дальность действия могла быть столь же хорошей, как ожидалось).
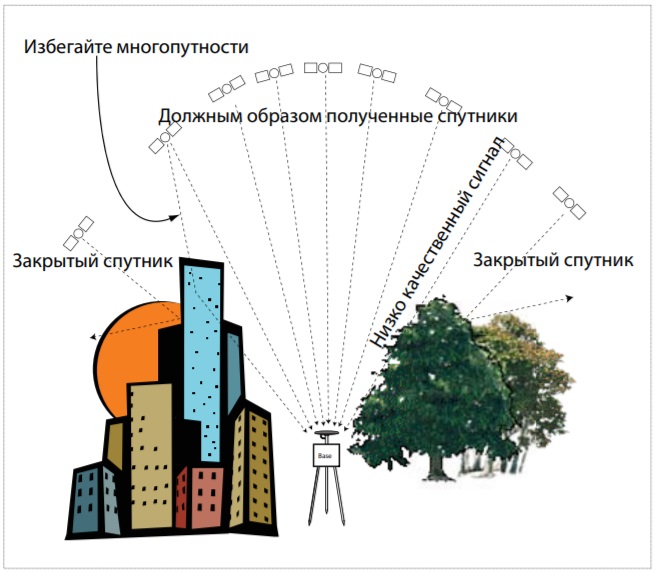
Первый критерий: условия GNSS приема
Удостоверьтесь, что антенна базы расположена в свободном от препятствий месте, дающем наилучший из возможных обзоров неба. По возможности избегайте рядом стоящих деревьев, зданий или любых высоких препятствий около базы. Наличие чистой видимости неба позволит базе собирать данные от максимального числа видимых спутников, что надежно гарантирует успешное, точное и быстрое выполнение съемки.
Необходимо обратить внимание на сигналы от низко расположенных спутников, закрытых деревьями, они могут иметь более неблагоприятное влияние на работу системы, чем те сигналы, которые полностью были перекрыты.
Второй критерий: положение базы известно или неизвестно?
Помимо хороших условий приема, необходимых базе, нужно также принять во внимание, что положение базы может быть известно с большой или меньшей точностью. Пояснения ниже помогут понять, что именно необходимо знать о точности положения базы.
1. Если необходимо получить абсолютное положение с сантиметровой точностью, в специальной системе координат для всех отснятых пунктов, то положение базы должно быть известно с той же самой сантиметровой точностью. Если выбранное положение базы неизвестно, то принимая во внимание, что для этого пункта в используемой системе координат нужна сантиметровая точность, то можно определить это положение статической съемкой с постобработкой. Однако необходимо знать координаты известного пункта, чтобы определить эту точку.
2.Если необходимо выполнить только относительные измерения (то есть найти взаимное положение одних точек относительно других), то база может быть установлена на неизвестном пункте, отвечающем требованию приема сигналов. В этом случае, положение, которое будет введено в базу, должно быть известно только с точностью в пределах нескольких метров.
Предостережение! Нужно иметь в виду, что в этом случае точки невозможно привязать к известной системе координат, если позже одна из этих точек точно не будет определена в нужной системе координат. При использовании полевого программного обеспечения можно также использовать функцию Локализация, чтобы привязать съемку к местной системе координат. Имеются некоторые неудобства, о которых необходимо
знать при установке базы на неизвестном пункте. Для каждых 15 метров ошибки между полученными и истинными координатами базы, одна миллионная (ppm) относительной ошибки будет учтена при вычислении вектора между базой и ровером, плюс абсолютная разность между вычисленным и реальным положениями базы. Например, координаты, принятые для пункта базы, отличаются на 30 метров от истинного положения базы.
Это 30-метровое различие от истинных координат приведет к 2 ppm (0.002 м на километр) ошибки в векторе между базой и ровером. Если ровер расположен на расстоянии 5 километров от базы, то это приведет к ошибке в векторе равной 0.010 м. В большинстве случаев, базовый приемник определяет положение лучше чем 30 метров (как правило ближе к 10-20 метрам), но возможна и ошибка в 50 метров. Если планируется использовать приблизительно подсчитанное положение для базы, то используйте короткие вектора между базой и ровером, гарантирующие, что добавляемая ошибка для выполняемой съемки будет не существенна.
Что такое инициализация?
Инициализация - процесс, с помощью которого приемник в реальном времени (или программное обеспечение постобработки) может решить неоднозначность целого числа, свойственную обработке фазы несущей. Решение неоднозначности целого числа - необходимое условие для приемника (или программного обеспечения) для получения положения с сантиметровой точностью. По этой причине, выполнение инициализации - это требование, которое нужно постоянно иметь в виду.
ПРИМЕЧАНИЕ: Не путайте этот инициализационный процесс с инициализацией GNSS приемника, в соответствии с последовательностью запуска которого приемник ищет видимые спутники для вычисления первого положения с 5-10-метровой точностью.
Важность длины базовой линии
Количество данных, требуемых для инициализации процесса вычисления положения в программном обеспечении (при постобработке) или ровера (в режиме реального времени - RTK), пропорционально длине базовой линии. Другими словами, чем длиннее базовая линия, тем большее время требуется для достижения инициализации.
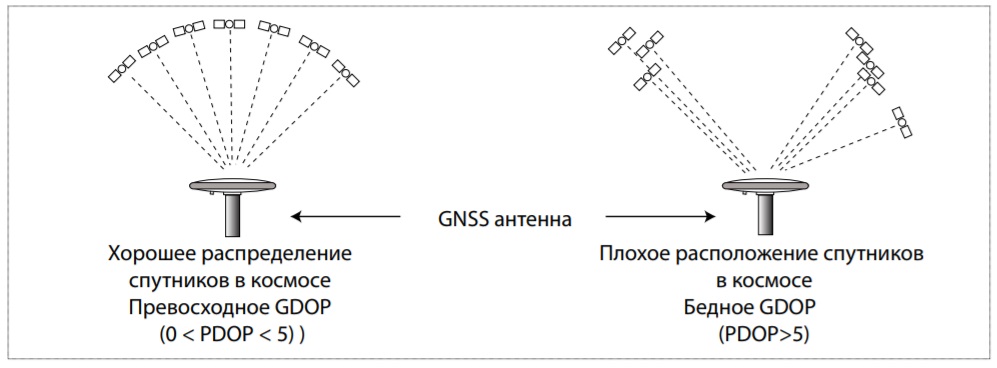
Что такое PDOP и тд ?
DOP (Dilution of Precision - снижение точности): Фактор, вычисляемый оборудованием, для описания расположения спутников в космосе. Чем более низкое значение DOP, тем лучшее расположение спутников и лучшая вероятность успешности съемки. Существуют несколько критериев DOP: GDOP, HDOP, VDOP, TDOP. Но, наиболее часто используемый - PDOP (критерий снижение точности позиционирования).
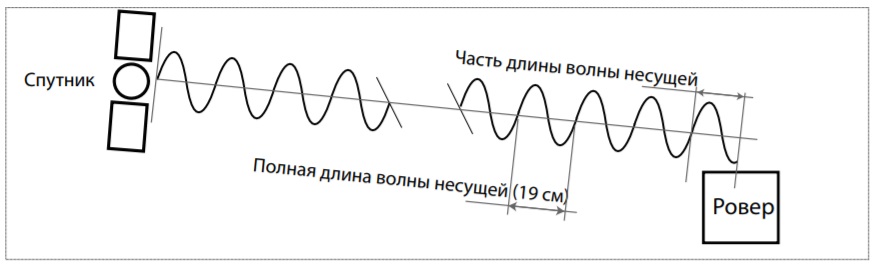
неоднозначность целого числа: Термин “Целое число” относится к числу полных длин волны несущего сигнала, укладываемых в расстояние, отделяющее спутник от приемника. “Неоднозначность” относится к факту, что это число является неизвестным в начале съемки. Поэтому, решение неоднозначности целого числа означает определение точного числа полных длин волны.
RTK и постобработка
При съемках в реальном времени инициализация системы считается достигнутой, когда система получила фиксированное RTK решение для любого нового положения, которое она вычисляет. Нужно всегда быть уверенным, что этот статус инициализации поддерживается до конца съемки. Поэтому, это весьма естественно, что в режиме RTK необходимо быть уверенным, что процесс инициализации был успешен. Если теряется статус RTK положения, то подразумевается, что система потеряла инициализацию и ее необходимо восстановить.
В съемках с постобработкой имеется та же самая потребность в инициализации, за исключением того, что в реальном времени система не всегда способна сообщить, что это требование выполнено. Помните, что при этом методе съемки, система - только сборщик сырых данных. Только впоследствии, возвратившись назад в офис для осуществления постобработки сырых данных, анализируя полный набор результатов собранных данных можно увидеть была ли успешной инициализация.
Кинематика против статики
При статических съемках риск неудачной инициализации значительно уменьшается, если GNSS антенна остается неподвижной и система используется для относительно длинных сессий записи с наилучшим возможным обзором неба. Но это не подходит для кинематических съемок, в течение
которых ровер перемещается с места на место, с реальными рисками:
• попадания GNSS антенны в «тень», приводящее к потере
захвата спутников.
• остановка записи сессий прежде, чем достаточное число данных было собрано для гарантирования инициализации.
Именно по этой причине нужно знать проблему инициализации и так осуществлять все необходимые шаги, чтобы удостовериться, что инициализация не только достигнута, но также будет сохранена до конца кинематической съемки.
Одночастотные против двухчастотных приемников
Двухчастотным GNSS приемникам требуется меньшее количество данных и меньше времени для инициализации. Однако недавние достижения позволили одночастотным приемникам значительно улучшить их работу на определяемом пункте и также уменьшить различие, отделяющее их от двухчастотных.
Что такое фазовый центр?
Фазовый центр - это виртуальная точка, которая представляет начало пространственно-временных координат антенны. Она находится обычно внутри антенны и часто на вертикальной оси антенны или близко к ней. Местоположение фазового центра точно определено изготовителем антенны после длительного ряда испытаний. Его положение обычно указывается непосредственно на антенне.
Почему высота GNSS антенны настолько важна?
Базовое измерение позволяет получить с сантиметровой точностью вектор между фазовыми центрами базовой и роверной антенн. Обычно всех интересует реальное положение снимаемой марки (или другого наземного пункта) над которым была установлена антенна, а не положение фазового центра антенны.
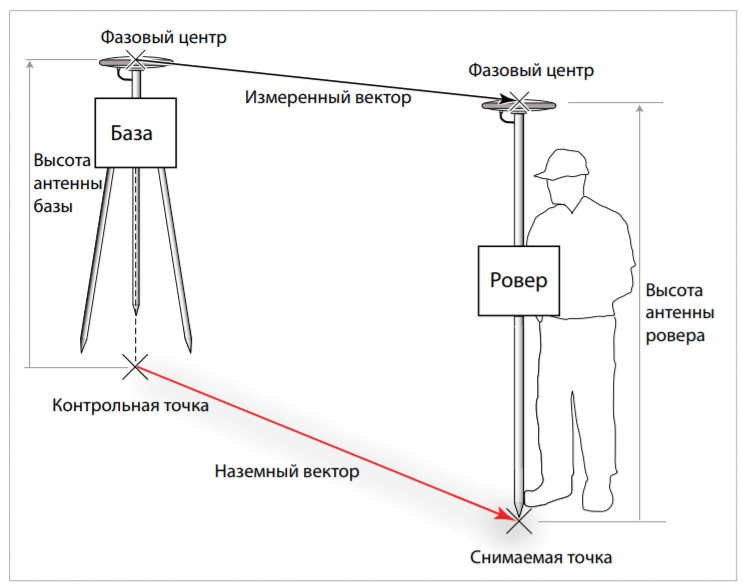
Чтобы вычислить положение наземного пункта, а не антенны, необходимо задать роверу параметры для выполнения редукции антенны. Для выполнения редукции антенны при вычислении положения в расчете учитывается высота антенны ровера. Для определения правильных положений снимаемых точек на поверхности земли в систему нужно ввести высоты как базовой так и роверной антенн, не зависимо от того, выполняется ли RTK съемка, или съемка с постобработкой.
Существует два различных способа измерения высоты антенны:
• Измерение наклонной высоты
• Измерение вертикальной высоты
Что такое наклонная высота и как измерить?
Наклонное измерение, как правило, выполняется на базе (обычно в направлении от антенны до наземного пункта), так как выполнение классического вертикального измерения не возможно по причине наличия аксессуаров (штатива, трегера и т.п.). Вместо выполнения неточного вертикального измерения можно прибегнуть к наклонному измерению, которое выполняется гораздо точнее (в том случае, если параметры антенны также точно известны) с помощью специальной рулетки, используемой для этой цели.
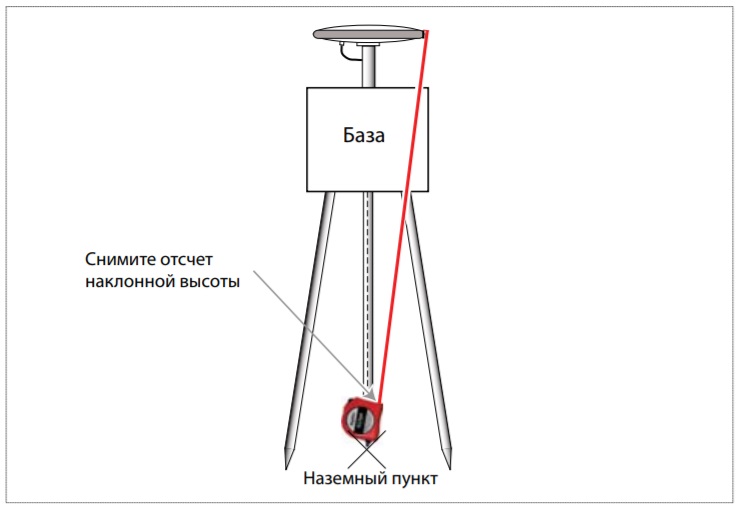
Установите базовую антенну точно над наземным пунктом.
• Вставьте конец рулетки в слот для выполнения измерения наклонной высоты.
• Разверните рулетку в направлении наземного пункта и поместите наконечник измерительной ленты в наземный пункт.
• Заблокируйте ленту и снимите отсчет, указанный на измерительной ленте: этот отсчет является наклонной высотой.
• ведите это значение в базовую систему как наклонное измерение.
Что такое вертикальная высота и как измерить?
Это более простой метод для измерения высоты антенны. Он в основном используется для мобильных приемников (роверов). Вертикальная высота представляет собой расстояние от низа GNSS антенны до поверхности земли
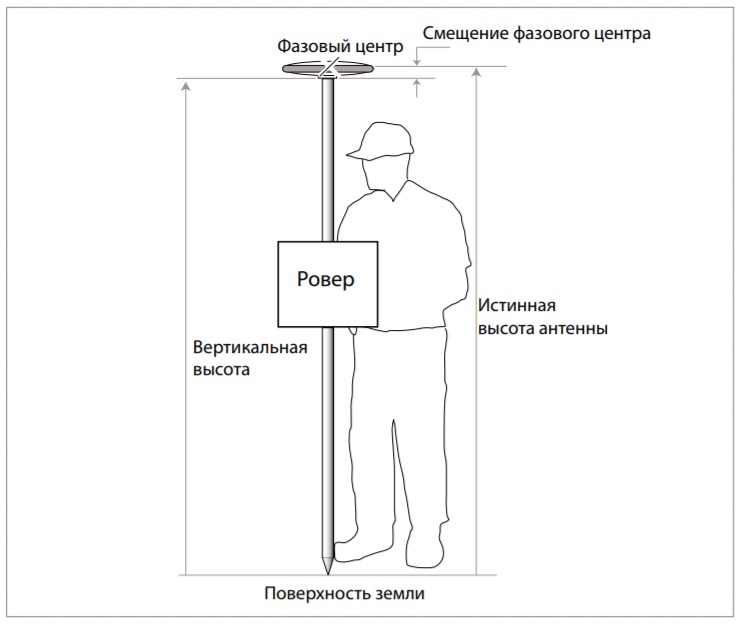
Реальная высота антенны равна сумме вертикальной высоты антенны и смещения фазового центра. Измерение вертикальной высоты состоит только в измерении длины вешки (штанги), используемой для удерживания GNSS антенны (или моноблочного роверного приемника). У большинства вешек высота регулируется и они имеют градацию для установки нужной высоты, поэтому измерение вертикальной высоты состоит только в снятии отсчета на
градационной шкале вешки.
От чего в основном зависит точность GNSS геодезического приемника?
При выполнении точной съемки точность прежде всего зависит от способности системы определять самую хорошую вариацию в части несущей длины волны, пришедшей в пункт съемки, в предположении, что число полных циклов несущей было определено успешно. Известно, что длина волны несущей, используемой в обработке сигнала L1, равна 19 см, а это дает возможность системе при пошаговой обработке достигнуть сантиметровой точности.
Во-первых, на практике точность будет зависеть от следующих параметров:
• Качества измерений фазы несущей, т.е. качества приема (уровень помех) и внешних условий (числа видимых спутников, присутствия или отсутствия многопутности).
• Внутреннего качества используемых обрабатывающих алгоритмов.
Точность также будет зависеть от данных RTK коррекций, полученных от базы:
• Более длинное расстояние между снимаемым пунктом и базой приводит к более высокой теоретической неопределенности, воздействующей на результат позиционирования.
• На результат позиционирования воздействуют более низкий уровень приема принимаемых данных RTK коррекций, вовлеченные в обработку шумовые данные и более высокая неопределенность измерений. Точность будет также зависеть от того, выполняется ли съемка в реальном времени (RTK) или в постобработке. В постобработке система обрабатывает собранные сырые данные с лучшей точностью, чем в реальном времени, при условии, что время наблюдения достаточно длительное.
Что значит Хсм + Y ppm в описании точности приемника?
Для всех точных геодезических систем компании Magellan, выражение глобальной точности положения равно сумма постоянного и переменного членов, как приведено в уравнении ниже:
Точность = Хсм + Y ppm
Где:
• X - постоянная составляющая (выраженная в сантиметрах), указывающая глобальную неопределенность измерения положения (о среднеквадратическом значении величины смотрите Точность измерений на странице 117). X определяет внутреннее качество приемника и его алгоритмов при номинальных условиях приема сигналов (т.е. открытое небо, минимальное число видимых спутников и хороший GDOP). Это значение может отличаться для вертикальных и горизонтальных компонентов положения.
• Y – переменная часть, выраженная в миллионных долях (ppm) длины базовой линии. Например, если Y=1 и длина базовой линии вашей съемки составляет около 8 км, то Y дополнительно и номинально добавляет 8 миллиметров неопределенности во все положения. Значение Y также отражает качество приемника и используемых алгоритмов. Подобно X, значение Y может отличаться для вертикальных и горизонтальных компонентов положения.
Следует обратить внимание, что обычные оценки точности для фиксированных RTK положений даются в нижеприведенной таблице для условий номинального приема (открытое небо, хороший GDOP, 5 - 7 видимых спутников). Но не забывайте, что эти значения специфические для каждой модели. Для получения более конкретной информации, пожалуйста, смотрите таблицу спецификаций используемой модели. Очевидно, что оценки точности ухудшаются, когда системе не удается получить фиксированное положение.
Точность измерений. Что такое rms?
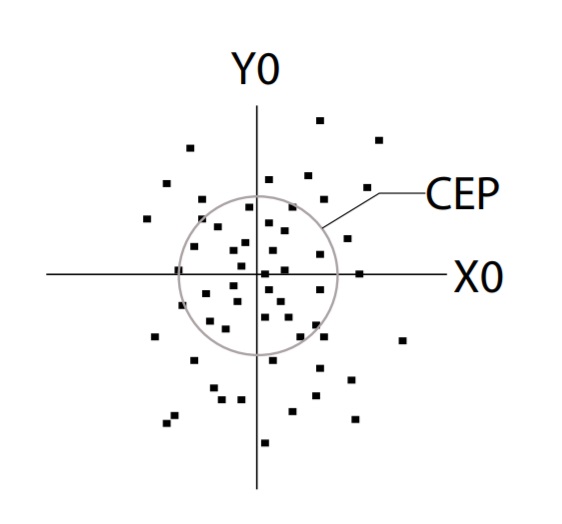
Ошибки в координатах, определенных с помощью GNSS систем, не постоянны (решение изменяется статистически). Если нанести горизонтальные координаты контрольной точки (X0, Y0), вычисленные GNSS системой в течение значительного периода времени (статическая съемка), то будет получен чертеж разброса, подобный показанному ниже.
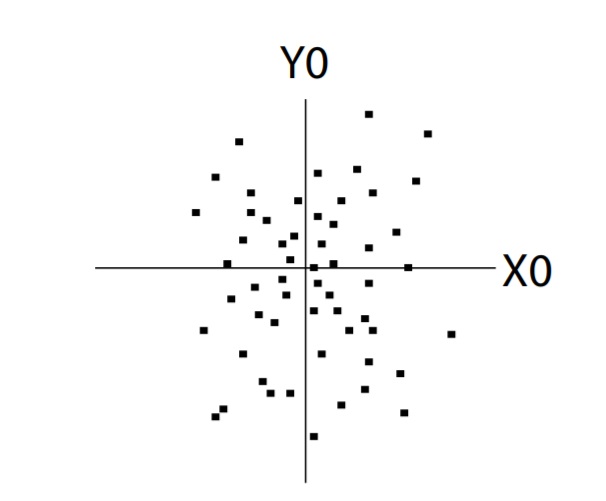
Начало координат в осях системы (X0, Y0) - истинное положение контрольной точки. Каждая точка представляет собой решение положения, полученное GNSS системой для этого пункта. Анализируя разброс решений, можно видеть, что точность определения координат различная. Главные критерии точности измерений, используемые GNSS производителем, следующие:
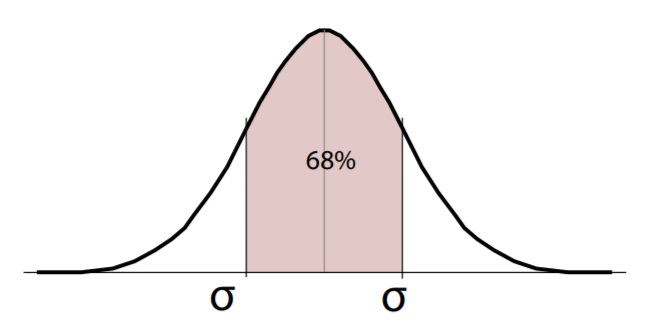
1. rms (root mean square - среднеквадратическое значение): точность получается вычислением квадратного корня из суммы квадратов отклонений, деленной на число слагаемых (статистический метод). Если распределение ошибки вдоль каждой оси является распределением Гаусса (это в общем случае), т.е. наименьшая ошибка стремится к нулю (или близка к нулю), тогда вероятность ошибки может быть ассоциирована со среднеквадратической точностью. Эта вероятность составляет около 68%, означая, что вычисленное положение будет в пределах анонсированной точности в 68 случаях из 100 во времени. Этот процент соответствует доверительному интервалу σ на кривой Гаусса.
2. Некоторые производители используют меру “2drms”, которая выведена из среднеквадратической меры для горизонтальной плоскости, используя следующую формулу:
Точность (2drms) = 2 х Точность (rms)
3. CEP (Circular Error Probable - вероятная круговая ошибка): точность равная радиусу круга с центром в истинном положении, в котором содержится 50% точек на графике разброса в горизонтальной плоскости (смотрите график ниже). Это означает, что вычисленное положение будет в пределах анонсированной точности 50% по времени.
Эллипсоидальная высота и превышение
Определение вертикальной координаты с помощью GNSS систем требует пояснения. За этой координатой фактически лежит специфика GNSS систем, сравнимая с традиционными системами для съемки.
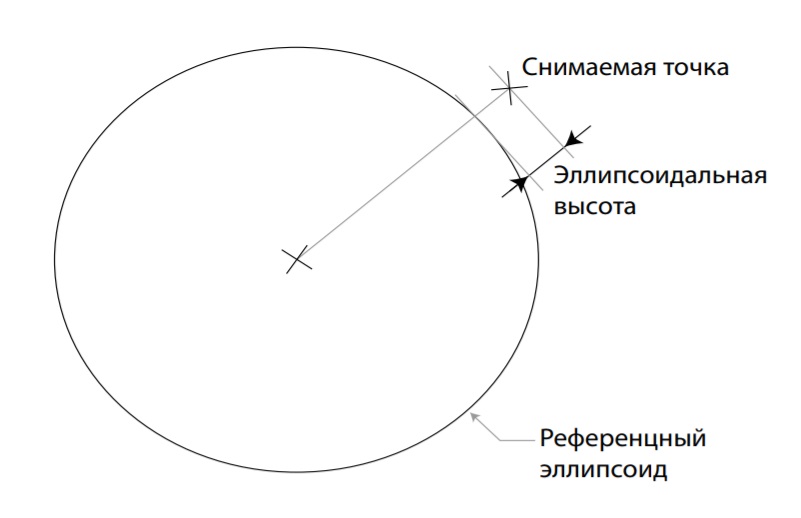
В основном, все положения, получаемые GNSS системами соответствуют географическим координатам (широте, долготе и высоте), относящимся к референцному эллипсоиду, который является простой и точной моделью для описания формы и поверхности нашей планеты. Референцный эллипсоид ссылается на WGS84, или лучше на ITRFхх, где хх есть год реализации ITRF (ITRF00 был реализован в 2000 году). Центр этого референцного эллипсоида совпадает с центром массы Земли, который также является началом координат прямоугольной геоцентрической системы координат ECEF (Earth-Centered Earth-Fixed) - системой декартовых координат X, Y, Z. Поскольку плановые координаты являются связанными, то референцный эллипсоид дает полную
достоверность. Преобразование географических координат в любую проекционную систему не создает никаких особых проблем.
Все намного усложняется, когда имеем дело с вертикальными координатами, так как геодезистам нужно определить очень точно, какой вид вертикальных координат они желают измерять. Вертикальная координата, получаемая GNSS системами, по существу есть высота снимаемого пункта над референцным эллипсоидом, называемая эллипсоидальной высотой.
Долгое время для измерения превышения пунктов геодезисты использовали понятие “средний уровень моря”. Средний уровень моря был общепринятым
“нулевым” превышением. Но это понятие имело некоторые ограничения.
Сегодня используется гораздо более лучшая модель вертикальной референцной системы, называемая геоидом. Эта модель определяется как поверхность, на которой гравитация постоянна.

Эта поверхность является нерегулярной, зависящей от плотности и распределения материалов на поверхности Земли, означая, что геоид не точно следует естественным особенностям земной поверхности. (Геоид - воображаемая поверхность, которую нельзя увидеть).
На практике модель геоида, используемая в GNSS системе, это файл, содержащий более или менее плотный массив точек, равномерно распределенных от края до края поверхности геоида. Для каждой точки файл обеспечивает плановые географические координаты и высоту (геоидальную высоту) между референцным эллипсоидом и геоидом. Протяженность файла геоида может быть всемирной или ограниченной отдельной областью.
Файл геоида, обеспечивающий точное моделирование неровности поверхности геоида, используется GNSS системой для интерполирования высоты между этой поверхностью и поверхностью референцного эллипсоида для снимаемых точек.
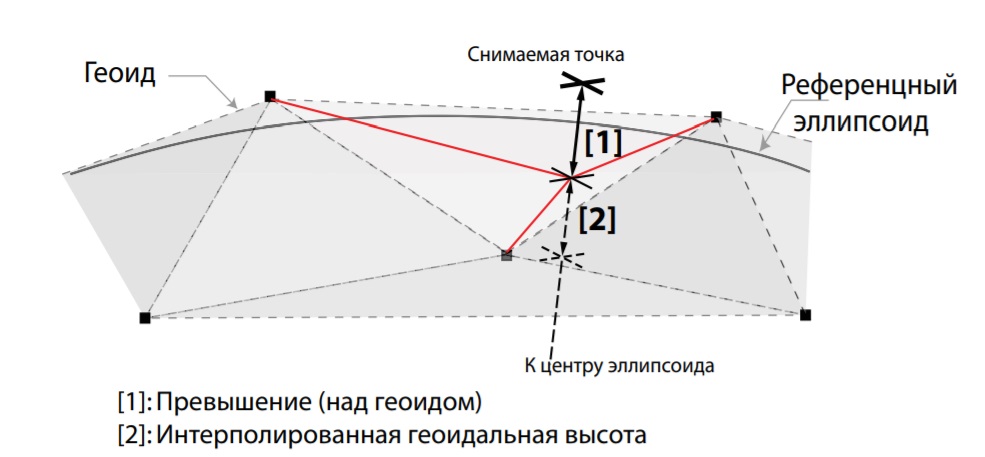
Из этой интерполяции система может получить превышение от эллипсоидальной высоты, используя следующую формулу:
Превышение [1] = Эллипсоидальная высота – Интерполированная геоидальная высота.
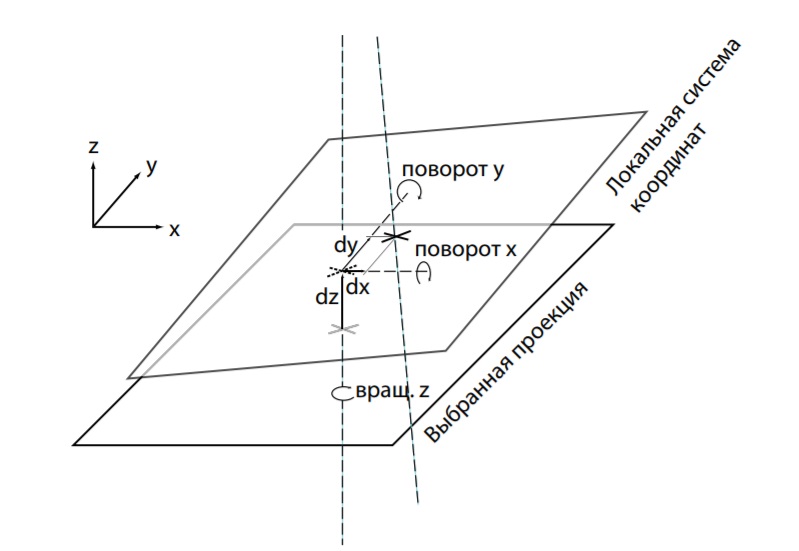
Что такое локализация?
Термин локализация (установление местонахождения), также известен как “калибровка” или “определение локальной системы координат”, точно соответствующей определяемой местной системе координат, в которой выполняется съемка. Процесс локализации выполняет поворот и смещение
плоскости для определенной проекционной системы, выбранной для работы. После выполнения локализации, оборудование вычисляет координаты каждого пункта, в том числе новые снимаемые точки в этой местной системе координат. Обычно с помощью локализации ваше оборудование определяет новую локальную систему координат (плоскую), сравнивая известные локальные координаты одной или нескольких референцных точек с соответствующими географическими координатами, введенными или измеренными для этих точек.
Когда необходима локализация (калибровка)?
Выполнение локализации требуется в следующих случаях:
• Работа требует использования данной стандартной проекции, но понятно, что оборудование не предоставит точно ожидаемых координат при размещении над существующими контрольными точками.
• Работа требует, чтобы была использована локальная проекция, но ни один из параметров этой проекции не известен.
• База работает на контрольной точке, чье положение было только что определено в автономном GPS режиме.
Методы локализации
Существуют несколько методов локализации. Выбор метода зависит от природы решаемой проблемы и количества доступных контрольных точек. Обычно используются нижеприведенные методы локализации:
• Плоское подобие: В этом методе, пользователь должен иметь три или больше контрольных точек, среди которых как минимум две должны находиться в горизонтальной плоскости. Для определения локальной системы координат выполняется преобразование методом наименьших квадратов. Преобразование включает поворот и параллельный перенос определенной используемой стандартной проекционной системы, в том числе и изменение масштабного коэффициента. Для достижения точной локализации на горизонтальной плоскости настоятельно рекомендуется использование не менее трех контрольных точек. Для гарантирования вертикальной локализации это число нужно поднять до четырех или больше.
• Жесткое тело: Такой же как и метод плоского подобия, за исключением того, что масштабный коэффициент удерживается фиксированным в процессе локализации.
• Преобразование Гельмерта: С помощью этого метода, пользователь обеспечивает семь параметров, легко изменяющих проекционную систему, используемую в работе. Эти параметры (dX, dY, dZ, поворот X, поворот Y, поворот Z и масштабный коэффициент) могут быть результатом многоточечной локализации, выполненной раньше.
• Одноточечный дирекционный угол: Этот метод используется для определения локальной системы координат, когда доступна только одна контрольная точка. В этом случае, пользователь должен точно определить ориентацию на Север (географический или истинный) локальной системы координат. Типичное приложение этого метода - использование пункта, в котором база устанавливается в начале координат (0, 0, 0) или на единственном пункте (например, 100, 1000, 0) локальной системы координат. В этом случае географическиекоординаты положения базы могут обеспечить только субметровую точность, когда геодезист заинтересован в сборе только локальных координат для работы. Поэтому геодезист должен убедиться, что географические координаты базы (обычно определяемые автономным GPS методом) могут быть получены в процессе локализации. В процесс локализации может быть включена модель геоида. В данном случае, все превышения, подготовленные для используемых контрольных точек, должны быть ортометрическими вместо эллипсоидальных.
Типовые рекомендации для завершения процесса локализации
Локализация, основанная на использовании контрольных точек, обычно достигается следующими шагами:
1. Убедитесь, что для работы выбрана правильная проекционная система. Что это означает? Существует два случая для рассмотрения:
• Некоторые контрольные точки, которые фиксируются горизонтальными или вертикальными в процессе локализации, могут иметь свои координаты, выраженные в известной проекционной системе. Рекомендуется выбрать эту проекцию как начальную проекционную систему работы.
• Если локальные координаты контрольных точек не ссылаются на любую известную проекционную систему, рекомендуется выбрать проекционную систему, которая является стандартной в районе съемки.
2. Введите локальные координаты первой контрольной точки.
3. Введите или снимите с помощью приемника широту, долготу и эллипсоидальную высоту первой контрольной точки.
4. Установите горизонтальный или/и вертикальный контроль для первой контрольной точки. Под этим подразумевается требование, что локальная система координат проходит, соответственно, через горизонтальное или/и вертикальное положение точки.
5. Повторяйте предыдущие три шага до тех пор, пока все контрольные точки не будут определены.
6. По завершению процесса локализации, убедитесь, что локальная система координат уже является новой проекционной системой, используемой в работе
Канал передачи данных при RTK съемке
В геодезической RTK системе канал передачи данных используется для передачи RTK поправок (поправок) от базы к роверу. Канал может быть одним из следующих двух типов:
• Автономный: пользователь имеет полный контроль над формированиеми передачей RTK поправок (оборудование используется в конфигурации базы/ровера).
• Сетевой: пользователь должен обратиться к третьей стороне, сетевому провайдеру для получения RTK поправок (оборудование используется только в конфигурации ровера)
В этом разделе представлены два основных способа передачи данных, доступных в геодезических системах :
• Радио (автономный)
• Мобильные коммуникации.
Ключевые термины и выражения
Возраст поправок: Возраст поправок равен промежутку времени, протекающему между временем поправок, генерируемых на базе, и временем, когда они фактически используются для получения RTK координат в ровере. В общем говоря, качество поправок уменьшается с увеличением их возраста.
CSD (Circuit Switched Data - технология передачи данных для мобильных телефонов). Оригинальная форма передачи данных, развиваемая для TDMA (Time Division Multiple Access - множественный доступ с разделением по времени), базирующаяся на телефонных мобильных системах, подобных GSM.
GPRS (General Packet Radio Service - пакетная радиосвязь общего пользования): Сервис мобильных данных, доступный пользователям GSM модемов (например, сотового телефона). Передача GPRS данных обычно оплачивается за мегабайт переданных/полученных данных, а передача данных через традиционное CSD подключение оплачивается за время соединения поминутно (независимо от того, передал пользователь данные или нет).
NTRIP (Networked Transport of RTCM via Internet Protocol - сетевая передача RTCM поправок посредством Интернет протокола): Протокол, используемый GNSS сервисом провайдеров, служит для передачи поправок от сетей референцных станций (баз). Среди хорошо известных используемых NTRIP протоколов: VRS, MAC, FKP и т.п
Использование радиомодемов
Радиомодемы могут быть использованы только в системах, имеющих базо-роверные конфигурации. Неограниченное число приемников могут получать RTK данные от одной и той же базы, хотя обычно они работают попарно (один на базе, в качестве передатчика, и другой на ровере, в качестве приемника).
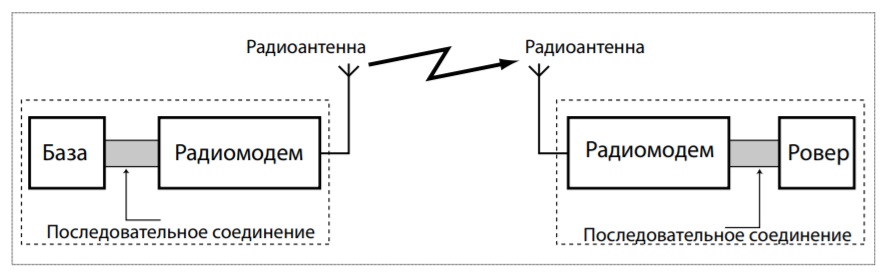
Внутренний и внешний радиомодемы
В зависимости от модели используемого приемника, радиомодем может быть:
• внутренний встроенный - модем соединяется с системой через последовательный порт (снаружи приемника видна только радиоантенна).
• внешним - модем подсоединяется к приемнику с помощью кабеля питания/передачи данных.
Требующие и не требующие лицензирования радиомодемы
Почти во всех странах использование радиосистем регулируется законодательством. В основном, правила касаются мощности передатчика, частотного диапазона и ширины полосы используемого канала. Они отличаются в разных странах. Во многих странах радиомодемы, используемые ниже определенного уровня излучаемой мощности и в пределах частотного диапазона, не требуют сертификации (или лицензирования) для использования.
Производители предлагают два вида радиомодемов:
• не требующие лицензирования, маломощные радиомодемы (коротковолнового диапазона).
• требующие лицензирования, радиомодемы средней мощности (длинноволнового диапазона). Получение права на работу с радиомодемом остается обязанностью пользователя.
Особенности
Главные особенности радиомодемов следующие:
• Полоса УВЧ (UHF) частот: УВЧ диапазон, в котором радиомодем передает или получает данные (не требующие лицензирования радиомодемы действуют в полосе 850-930 МГц, другие радиомодемы в полосе 410-470 МГц).
• Мощность излучения: мощность передающего базового радиомодема (в Вт).
• Скорость передачи данных: Скорость, с которой несущая частота модулируется RTK данными поправок (в Кбит/с).
Не перепутайте со скоростью передачи данных (в бодах) последовательного порта, соединяющего радиомодем с приемником.
С радиомодемом нет необходимости в любом третьем поставщике данных. База может сама генерировать и передавать RTK данные поправок через радиомодем. Этовозможно в любое время и в любом месте. Кроме того, несколько роверов может работать в режиме RTK от одной и
той же базы (режим multi-point). Однако, распространение волн в УВЧ диапазоне иногда затруднено. Радиодиапазон может быть уменьшен, если
существуют помехи между базой и ровером. Как правило, радиоантенну нужно устанавливать на максимально возможной высоте.
Коммуникации сотовой связи
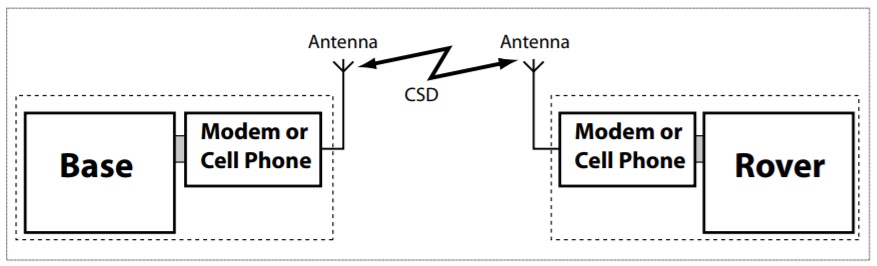
GSM модемы могут использоваться для канала передачи данных в одной из следующих двух конфигураций:
• Пара GSM модемов могут работать в режиме CSD. Один используется на базе, а второй - на ровере. Канал передачи данных действует подобно телефонной связи, при этом ровер дозванивается. Эта конфигурация хорошо подходит для геодезических систем, используемых в базовой или роверной конфигурации.
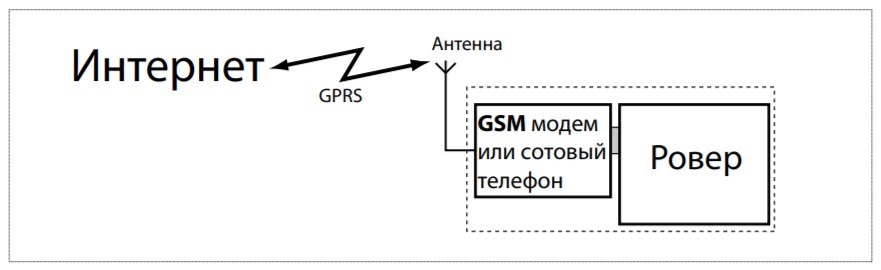
Один модем (или сотовый телефон) работает в режиме GPRS. Модем используется на ровере, чтобы установить связь через Интернет, прямой IP адрес или режим NTRIP. Затем ровер начинает получать RTK данные поправок от выбранной базы. Этот тип канала передачи данных
хорошо подходит для геодезических систем, используемых только в роверной конфигурации.
Активация канала передачи данных в режиме NTRIP
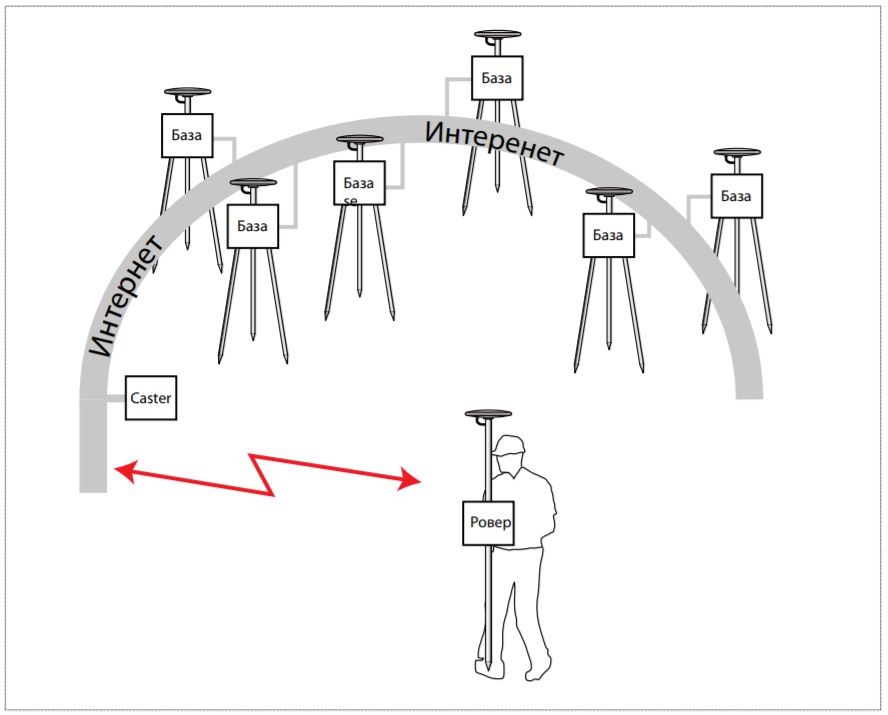
В этом режиме необходимо:
• Ввести следующие пять идентификационных параметров для Caster (сервера):
1. IP адрес
2.Имя точки доступа
3. Номер порта
4.Логин
5. Пароль
• Caster обратится к исходной таблице, из которой можно выбрать базу, с которой будет работать ровер.
Контроль канала передачи данных. Что такое задержка/возраст поправки?
Для успешного выполнения полевых работ большое значение имеет уверенность, что канал передачи данных функционирует постоянно. Хороший показатель для контроля канала передачи данных - это возраст поправок. Этот параметр выводится на экран контроллера.
Когда канал передачи данных работает нормально, возраст поправок постоянно равен скорости передачи данных RTK поправок на базе. Если передача данных поправок не производится, или ровер не в состоянии их декодировать и использовать, то возраст поправок будет увеличиваться.
Если увеличение возраста поправок временное, то необходимо контролировать только канал передачи данных (пока ровер продолжает вычислять координаты при фиксированном решении). Но если возраст поправок продолжает увеличиваться, то это может привести к потере статуса фиксированного решения на ровере для всех вычисляемых координат. В этом случае, необходимо выяснить причину некорректной работы канала передачи данных и принять необходимые меры для устранения неисправностей.
Принимая во внимание все выше сказанное, рекомендуется следующее - при выполнении полевых работ постоянно следить за возрастом поправок.
Планирование крупномасштабной статической съемки с постобработкой
Планирование крупномасштабной статической съемки состоит из двух основных шагов:
• Проект сети
• Схема наблюдений
Проект сети
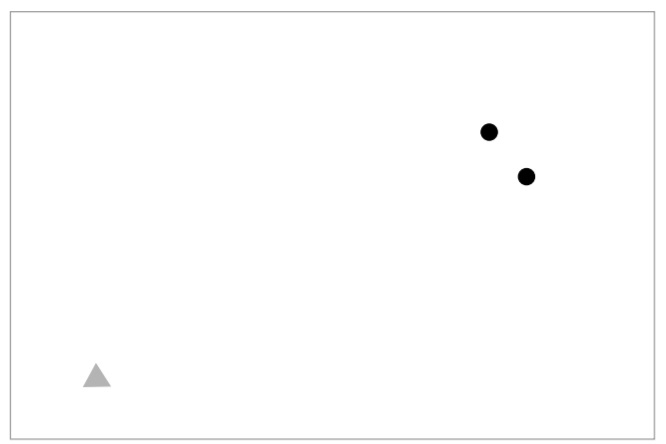
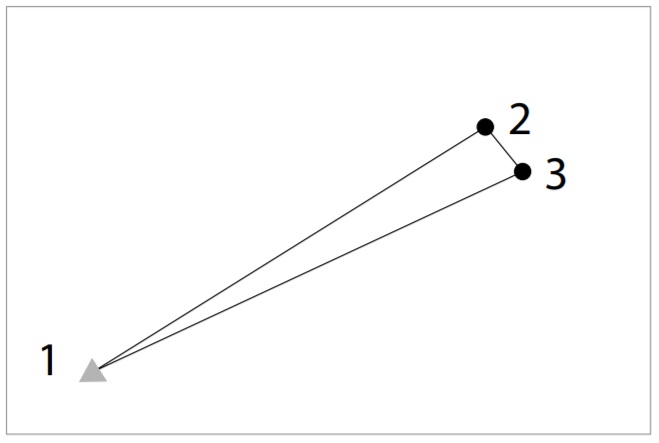
Независимо от числа (2 или более) контрольных точек, которые будут заложены для статической съемки, необходимо запроектировать сеть в зависимости от количества и расположения наблюдаемых пунктов, необходимых для эффективного позиционирования новых точек. Для иллюстрации рассмотрим пример, где должны быть заложены две новых взаимновидимых точки на площадке строительного объекта для их использования в качестве обоснования (смотрите Рис. 1).
Рис. 1. Пример контрольной съемки с 3 точками
Если требуется выполнить эту съемку обычным тахеометром, то необходимо проложить замкнутый теодолитный ход от существующего контрольного пункта до двух новых точек (смотрите Рис. 2). Тот же самый подход может использоваться и для GNSS съемок. На приведенном ниже рисунке показан проект сети для этого случая
Рис. 2. Проект замкнутого теодолитного хода
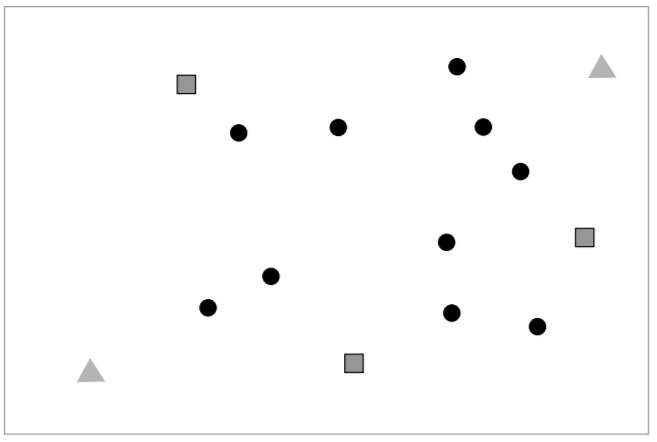
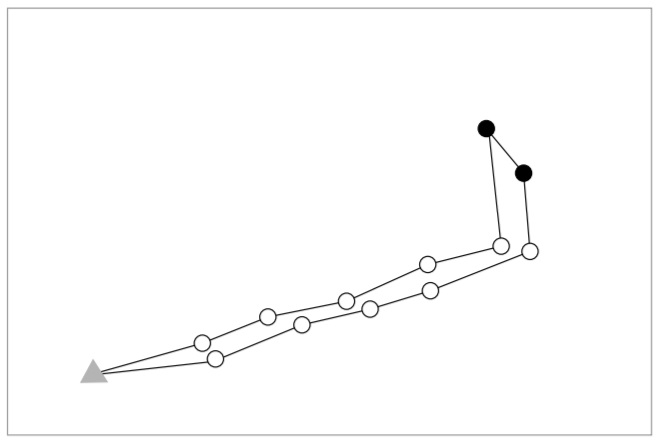
Предыдущий пример привел к очень простому проекту сети. На Рис. 3 представлена более комплексная контрольная съемка, где должны быть заложены 10 новых пунктов, основанных на двух плановых и трех существующих высотных контрольных пунктах.
Рис. 3. Пример контрольной съемки с 15 точками
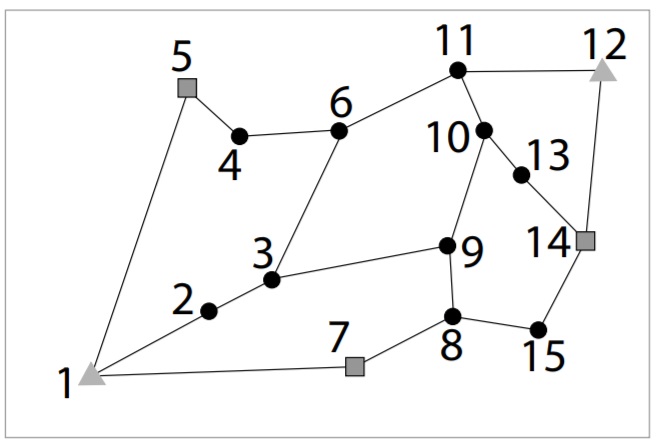
Опять же, если выполнять эту съемку обычным тахеометром, то необходимо запроектировать такую схему теодолитного хода, которая представляет собой ясно видимую сеть замкнутых ходов, проходящих через снимаемые точки. На Рис. 4 показан один из возможных проектов сети.
Рис.4. Проект сети для контрольной съемки с 15 точками
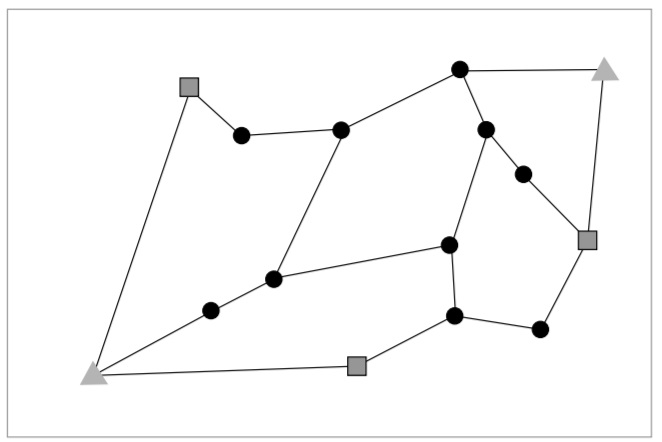
Хотя этот проект сети был создан обычным проложением теодолитного хода (в уме), тот же самый проект может также использоваться при выполнении съемки GNSS оборудованием.
При проектировании сети придерживайтесь следующих правил:
Проектируемые замкнутые полигоны должны проходить через точки сети и должны быть похожи на квадрат или круг. Избегайте длинных и узких замкнутых контуров. Полигоны в форме круга или квадрата являются более жесткими геометрически.
• Число точек в каждом полигоне должно быть менее 10.
• Всегда включайте в полигон взаимовидимые точки, которые могут использоваться как пара исходных точек для ориентирования обычного хода. Так как в большинстве случаев взаимовидимые точки относительно близки друг к другу, важно выполнить прямое наблюдение между ними.
Схема наблюдений
По окончанию создания проекта сети необходимо определить, каким образом и когда будет выполнен сбор данных для создания желаемой сети.
Как организовать сбор данных
Если бы использовался обычный тахеометр для выполнения нашего примера контрольной съемки с 3 точками, то проложенный ход, был бы похож на ход из Рис. 5.
Рис.5. Замкнутый теодолитный ход контрольной съемки с 3 точками
Количество сторон теодолитного хода, требуемых для соединения каждой точки в сеть, будет зависеть от условий на участке земли между точками.
Хорошо, если район съемки является относительно плоским и есть прямое направление от существующего контрольного пункта до двух новых закладываемых точек, тем самым, минимизируется число требуемых сторон хода для замыкания полигона.
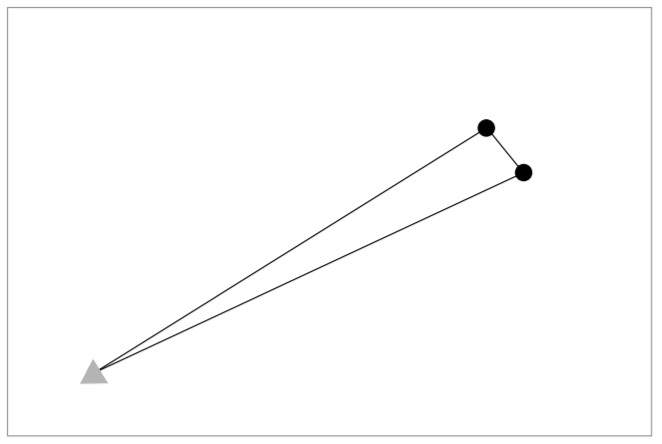
GNSS съемка имеет преимущество ввиду отсутствия требования прямой видимости между точками съемки. Это позволяет произвести прямые наблюдения между точками. Чтобы пояснять это, возьмем наш проект сети для контрольной съемки с 3 точками (смотрите Рис. 6).
Рис. 6. Проект сети для контрольной съемким с 3 точками
Предположим, что для выполнения вышеупомянутой съемки будет использоваться система из двух приемников. Для создания связи между существующим контрольным пунктом 1 и новой точкой 2 поместите один приемник на точке 1, а другой - на точке 2 и одновременно соберите данные. После завершения наблюдения переместите приемник с точки 2 на точку 3. Выполните еще одно наблюдение, одновременно собирая данные на точках 1 и 3. После завершения наблюдения переместите приемник с точки 1 на точку 2. Выполните завершающее наблюдение на точках 3 и 2. Когда эти данные будут загружены и обработаны, будет получено три вектора (приращения координат), формирующих проект сети (смотрите Рис. 6).
Теперь рассмотрим ситуацию, где используется система из трех приемников. При помещении приемников на три точки сети, данные для всех трех векторов могут быть собраны в одном наблюдении, а не в трех отдельных наблюдениях (необходимых при использовании системы из двух приемников). Теперь рассмотрим схему наблюдений для более комплексной съемки с 15 точками (Рис. 7).
Рис.7. Проект сети для контрольной съемки с 15 точками
Для выполнения этого проекта сети необходимо осуществить прямые GNSS наблюдения между всеми непосредственно связанными точками. Каждая связь может рассматриваться как назначенный вектор. Подсчитывая связи в этом проекте сети, можно определить, что в этот проект сети должны входить 19 векторов. Если бы съемка выполнялась с использованием системы из двух приемников, были бы необходимы 19 отдельных сессий сбора данных (наблюдений). Например, можно начать съемку, поместив приемники на точках 1 и 2. После окончания этого наблюдения необходимо переместить приемник с точки 1 на точку 3 для выполнения наблюдений точек 2 и 3. И так далее, пока все векторы не будут определены.
Теперь рассмотрим ситуацию, где выше рассмотренная контрольная съемка с 15 точками должна быть выполнена с использованием системы из трех приемников. При съемке тремя приемниками каждая сессия наблюдений формирует два вектора из проекта сети. Например, можно начать съемку, размещая один приемник на точке 1, второй на точке 2, а третий на точке 7. Эти три приемника одновременно собрали бы данные на этих трех точках, что приведет к получению векторов между точками 1 и 2, а также точками 1 и 7. В дополнение к этим двум векторам будет получен третий
вектор между точками 2 и 7. После окончания первого наблюдения можно переместить один приемник с точки 2 на точку 9, а второй приемник с точки 1 на точку 8. Во время второго наблюдения приемник в точке 7 будет оставаться, при этом точка 7 используется как
объединительная точка при соединении первого и второго наблюдений. Такая процедура будет продолжаться до тех пор, пока все векторы не будут определены. На Рис. 8 показано, как могла бы выглядеть схема наблюдений системой из трех приемников.
Рис. 8. Схема наблюдений для контрольной съемки с 15 точкам
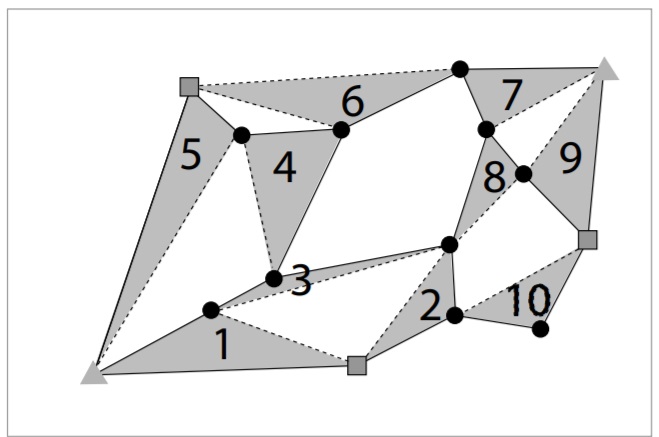
Анализ схемы наблюдений показывает, что для выполнения съемки, основанной на проекте сети (Рис. 4), будет требоваться 10 отдельных сессий наблюдений. Заметим, что во всех сессиях наблюдений, за исключением сессии 6, определяются два требуемых вектора проекта сети. Наблюдение 6 позволяет определить только один вектор, так как число заданных векторов (19) является нечетным.
Для дополнительной консультации обращайтесь к специалистам компании Aspect.